System Identification of Multisensory Integration And Dynamic Sensory Weighting
Spotlight
funded by
TÜBİTAK 1001 Scientific Research Projects Program
PI:
Ismail Uyanik, PhD
Ongoing 01/11/2023
Abstract
Animals combine signals from different sensory organs to understand their environment. Signals from different sensory modalities are
filtered and integrated in neural circuits of the central nervous system (CNS). The CNS dynamically weight the contribution of different
sensory modalities to improve perception. Although this process is a common feature among taxa, behavioral and neural mechanisms underlying
multisensory integration and dynamic sensory weighting are not yet fully understood.
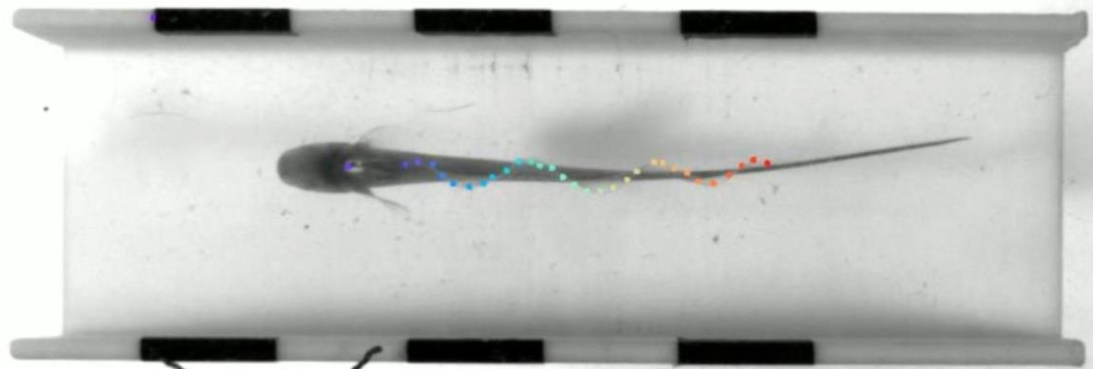
This project’s aim is to understand multisensory integration and dynamic sensory weighting through the study of weakly electric fish's natural shelter-seeking behavior, which involves the combination of their visual and electrosensory systems. These fish prefer to hide in objects such as tree trunks in their habitats. They also follow these objects by swimming forward and backward. They use visual and electrosensory signals to achieve this in real time. Weakly electric fish change the contribution of these senses depending on sensory salience, noise level, and reliability in their environment.
Our goal is to develop a unique experimental setup around this behavior to reveal how signals from visual and electrosensory systems are filtered and combined in the brain and how the weighting of these signals dynamically changes. Our project has several conceptual, theoretical, and experimental novelties. One of its most significant contributions is our unique experimental setup, which enables the study of multisensory integration in weakly electric fish allowing the separation of the contributions of visual and electrosensory systems.
Our project also contributes conceptually by exploring how multisensory integration is controlled by factors such as sensory salience and active sensing. During behavior, animals regulate the dynamics of their sensory receptors with additional movements (such as slowly moving our fingers over a surface to feel its texture) to increase the salience of external stimuli. This means that sensory salience and, consequently, the reliability of sensory cues are controlled not only by the dynamics of external stimuli but also by the movements of animals.
Our proposal provides a significant conceptual contribution by integrating sensory salience and active sensing movements into the multisensory integration processes. Finally, our project contributes theoretically by combining control theory and signal processing techniques to model a state-estimation based multisensory integration processes using dynamic Bayesian networks.
Within our project, refuge tracking behavior of weakly electric fish will be studied by changing the salience of visual and electrosensory cues, and the resulting changes in sensory weighting will be measured. Then, active sensing movements employed by the fish will be amplified or attenuated, and the impact of these movements on sensory weighting will be examined. To model the changes in sensory weighting, Kalman filters, extended Kalman filters, and unscented Kalman filters will be used. A dynamic Bayesian network structure suitable for the multi-sensory behavioral control of the fish will be created to model the dynamic sensory weighting. Finally, a dynamic sensory weighting model based on state estimation performance will be developed using actual fish data.
Understanding the mechanisms underlying multisensory integration and dynamic sensory weighting will have significant implications for life sciences and engineering. Understanding the process of sensory integration will provide a basis for developing specific diagnosis and rehabilitation methods for many disorders involving sensorimotor integration problems such as autism spectrum disorder. In engineering, it will contribute to the development of next-generation sensor fusion methods for autonomous vehicles and robotic systems. To solve these problems, we follow a unique interdisciplinary approach with a team working in neuroscience, control theory, and system identification. This approach will provide us with the opportunity to use the most advanced technologies for data collection and analysis while interpreting the results by comparing them with existing biological observations.
This project’s aim is to understand multisensory integration and dynamic sensory weighting through the study of weakly electric fish's natural shelter-seeking behavior, which involves the combination of their visual and electrosensory systems. These fish prefer to hide in objects such as tree trunks in their habitats. They also follow these objects by swimming forward and backward. They use visual and electrosensory signals to achieve this in real time. Weakly electric fish change the contribution of these senses depending on sensory salience, noise level, and reliability in their environment.
Our goal is to develop a unique experimental setup around this behavior to reveal how signals from visual and electrosensory systems are filtered and combined in the brain and how the weighting of these signals dynamically changes. Our project has several conceptual, theoretical, and experimental novelties. One of its most significant contributions is our unique experimental setup, which enables the study of multisensory integration in weakly electric fish allowing the separation of the contributions of visual and electrosensory systems.
Our project also contributes conceptually by exploring how multisensory integration is controlled by factors such as sensory salience and active sensing. During behavior, animals regulate the dynamics of their sensory receptors with additional movements (such as slowly moving our fingers over a surface to feel its texture) to increase the salience of external stimuli. This means that sensory salience and, consequently, the reliability of sensory cues are controlled not only by the dynamics of external stimuli but also by the movements of animals.
Our proposal provides a significant conceptual contribution by integrating sensory salience and active sensing movements into the multisensory integration processes. Finally, our project contributes theoretically by combining control theory and signal processing techniques to model a state-estimation based multisensory integration processes using dynamic Bayesian networks.
Within our project, refuge tracking behavior of weakly electric fish will be studied by changing the salience of visual and electrosensory cues, and the resulting changes in sensory weighting will be measured. Then, active sensing movements employed by the fish will be amplified or attenuated, and the impact of these movements on sensory weighting will be examined. To model the changes in sensory weighting, Kalman filters, extended Kalman filters, and unscented Kalman filters will be used. A dynamic Bayesian network structure suitable for the multi-sensory behavioral control of the fish will be created to model the dynamic sensory weighting. Finally, a dynamic sensory weighting model based on state estimation performance will be developed using actual fish data.
Understanding the mechanisms underlying multisensory integration and dynamic sensory weighting will have significant implications for life sciences and engineering. Understanding the process of sensory integration will provide a basis for developing specific diagnosis and rehabilitation methods for many disorders involving sensorimotor integration problems such as autism spectrum disorder. In engineering, it will contribute to the development of next-generation sensor fusion methods for autonomous vehicles and robotic systems. To solve these problems, we follow a unique interdisciplinary approach with a team working in neuroscience, control theory, and system identification. This approach will provide us with the opportunity to use the most advanced technologies for data collection and analysis while interpreting the results by comparing them with existing biological observations.
Other Research
All
Ongoing
Completed
Ongoing
|
01/11/2023
Completed
|
17/04/2023 - 17/04/2025
Completed
|
01/11/2022 - 01/04/2023
Completed
|
01/08/2022 - 01/08/2023
Completed
|
01/06/2022 - 01/08/2023
Completed
|
01/04/2021 - 01/04/2023
Completed
|
01/01/2020 - 15/04/2020