Behavioral Mechanisms of Active Sensing
Spotlight
funded by
TÜBİTAK 1001 Scientific Research Projects Program
PI:
Ismail Uyanik, PhD
Completed 15/01/2021 - 15/01/2024
Abstract
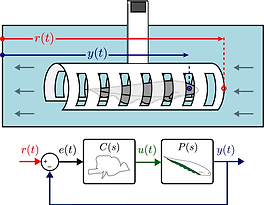
This project aims to uncover the behavioral mechanisms of active sensing movements in weakly electric fish.
To this end, a real-time experimental setup was designed and produced, allowing the fish to perform unrestricted
shelter tracking behaviors.
Various experiments were conducted under different perceptual saliency conditions (light, conductivity, and shelter structure). The swimming dynamics of the fish used in the experiments and the system identification of the sensorimotor controller were performed using PLA refuge, fish, and node data.
Additionally, the observability analyses were theoretically validated and supported by simulation studies. Two metrics were used to measure the shelter tracking performance of the fish: RMSE and tracking error. It was observed that under lighting conditions, tracking performance gradually deteriorated when transitioning from light to dark.
Both shelter length and lighting have a significant impact on shelter tracking behavior. Statistically significant differences in tracking performance were found among fish species. This study revealed that active sensing behaviors are optimized to minimize predictive uncertainty.
The proposed predictive uncertainty model successfully simulated the shelter tracking behaviors of weakly electric fish and showed the highest accuracy compared to other models. These findings make significant contributions to our understanding of how active sensing behaviors are adapted to optimize task-dependent state estimation performance.
Various experiments were conducted under different perceptual saliency conditions (light, conductivity, and shelter structure). The swimming dynamics of the fish used in the experiments and the system identification of the sensorimotor controller were performed using PLA refuge, fish, and node data.
Additionally, the observability analyses were theoretically validated and supported by simulation studies. Two metrics were used to measure the shelter tracking performance of the fish: RMSE and tracking error. It was observed that under lighting conditions, tracking performance gradually deteriorated when transitioning from light to dark.
Both shelter length and lighting have a significant impact on shelter tracking behavior. Statistically significant differences in tracking performance were found among fish species. This study revealed that active sensing behaviors are optimized to minimize predictive uncertainty.
The proposed predictive uncertainty model successfully simulated the shelter tracking behaviors of weakly electric fish and showed the highest accuracy compared to other models. These findings make significant contributions to our understanding of how active sensing behaviors are adapted to optimize task-dependent state estimation performance.
Other Research
All
Ongoing
Completed
Ongoing
|
01/11/2023
Completed
|
17/04/2023 - 17/04/2025
Completed
|
01/11/2022 - 01/04/2023
Completed
|
01/08/2022 - 01/08/2023
Completed
|
01/06/2022 - 01/08/2023
Completed
|
01/04/2021 - 01/04/2023
Completed
|
01/01/2020 - 15/04/2020