Design and Implementation of an Insect-Like Wall-Following Robot with a Soft Robotic Antenna
Spotlight
funded by
Hacettepe University Scientific Research Projects Coordination Unit
PI:
Ismail Uyanik, PhD
Completed 01/06/2022 - 01/08/2023
Abstract
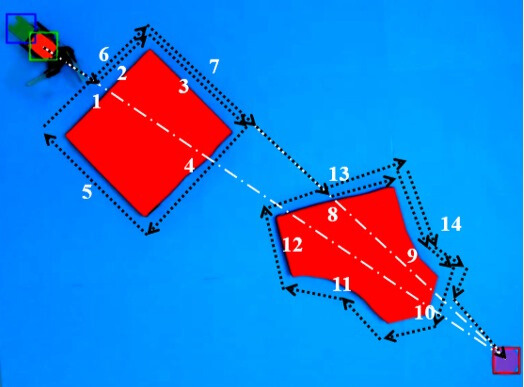
This study aims to measure distances using a soft robotic sensor with bending angle and strain sensing capabilities. The sensor, produced in a laboratory setting, will be mounted as a tactile sensor on a rigid and mobile robotic structure. The goal is to develop a robot capable of wall-following, measuring the distance to the wall, and detecting changes in the wall's shape. The design of the robotic tactile sensor and the rigid robotic structure will be inspired by the movement of a cockroach and the interaction of its antenna with its surroundings. The soft sensor, which will act as the tactile sensor, will be fabricated by injecting a conductive liquid material into a channel embedded within a silicone rubber base. By measuring changes in electrical resistance caused by bending (flexing) and/or strain movements, the strain and/or bending angle affecting the sensor can be determined. The measurement capabilities of the sensor will be tested on a setup where it moves along a predefined path. This setup will allow the designers to establish the resistance-distance relationship of the sensor based on known distances and wall shapes, enabling an appropriate modeling of this relationship.
In the final phase of the study, an autonomous wheeled robot will be designed, and the previously characterized sensor, which has been tested and validated on the test setup, will be mounted onto the robot. The robot will be expected to maintain a constant distance from walls it encounters using the tactile sensor. The control algorithm for achieving this will rely solely on feedback from the sensor.
Conventional robotic systems often utilize infrared (IR) or ultrasonic distance sensors, which tend to be more expensive and may not perform effectively in challenging environments such as underwater or under debris. This study aims to develop a low-cost robotic system with high performance in various environments, designed to be purpose-specific and scalable in different sizes. To the best of our knowledge, no similar robotic system with a fully soft-material-based tactile sensor exists among current studies.
In the final phase of the study, an autonomous wheeled robot will be designed, and the previously characterized sensor, which has been tested and validated on the test setup, will be mounted onto the robot. The robot will be expected to maintain a constant distance from walls it encounters using the tactile sensor. The control algorithm for achieving this will rely solely on feedback from the sensor.
Conventional robotic systems often utilize infrared (IR) or ultrasonic distance sensors, which tend to be more expensive and may not perform effectively in challenging environments such as underwater or under debris. This study aims to develop a low-cost robotic system with high performance in various environments, designed to be purpose-specific and scalable in different sizes. To the best of our knowledge, no similar robotic system with a fully soft-material-based tactile sensor exists among current studies.
Other Research
All
Ongoing
Completed
Ongoing
|
01/11/2023
Completed
|
17/04/2023 - 17/04/2025
Completed
|
01/11/2022 - 01/04/2023
Completed
|
01/08/2022 - 01/08/2023
Completed
|
01/06/2022 - 01/08/2023
Completed
|
01/04/2021 - 01/04/2023
Completed
|
01/01/2020 - 15/04/2020